บทนำ Robot Calibration by SprutCAM
การปรับเทียบหุ่นยนต์ทำงานร่วมกับ MachineMaker 2.0
แอปสำหรับถ่ายโอนข้อมูลเกี่ยวกับตำแหน่งเครื่องมือไปยัง MachineMaker 2.0 โดยอัตโนมัติ
การปรับเทียบหุ่นยนต์รองรับการปรับเทียบ TCP สำหรับหุ่นยนต์ประเภทต่อไปนี้:
- ฟานุค
- คูก้า
- ทอร์มาช
- โบรุนเต้
- ซีอาร์พี
- บริษัท เด็นโซ่
- โดบอท
- เอสตุน
- ฮิวิน
- ฮุนได
- โมโตแมน
- นิวเกอร์
- มานูเทค
- นาชิ
- OTC ไดเฮ็น
- ตูริน
มันทำงานอย่างไร:
- สแกนโค้ด QR ใน MachineMacker 2.0 เพื่อเชื่อมโยงแอปกับโปรเจ็กต์
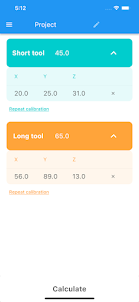
- รวบรวมข้อมูล TCP ของหุ่นยนต์ ขั้นแรกด้วยเครื่องมือสั้น ๆ จากนั้นจึงใช้เครื่องมือยาว
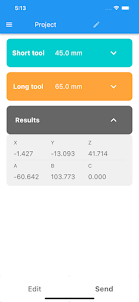
- เข้าสู่การอ่าน XYZ ป้อนความยาวของส่วนที่ยื่นของเครื่องมือจากสปินเดิลในหน่วยมิลลิเมตร
คลิก "คำนวณ"
แอปสำหรับถ่ายโอนข้อมูลเกี่ยวกับตำแหน่งเครื่องมือไปยัง MachineMaker 2.0 โดยอัตโนมัติ
การปรับเทียบหุ่นยนต์รองรับการปรับเทียบ TCP สำหรับหุ่นยนต์ประเภทต่อไปนี้:
- ฟานุค
- คูก้า
- ทอร์มาช
- โบรุนเต้
- ซีอาร์พี
- บริษัท เด็นโซ่
- โดบอท
- เอสตุน
- ฮิวิน
- ฮุนได
- โมโตแมน
- นิวเกอร์
- มานูเทค
- นาชิ
- OTC ไดเฮ็น
- ตูริน
มันทำงานอย่างไร:
- สแกนโค้ด QR ใน MachineMacker 2.0 เพื่อเชื่อมโยงแอปกับโปรเจ็กต์
- รวบรวมข้อมูล TCP ของหุ่นยนต์ ขั้นแรกด้วยเครื่องมือสั้น ๆ จากนั้นจึงใช้เครื่องมือยาว
- เข้าสู่การอ่าน XYZ ป้อนความยาวของส่วนที่ยื่นของเครื่องมือจากสปินเดิลในหน่วยมิลลิเมตร
คลิก "คำนวณ"
เพิ่มเติม